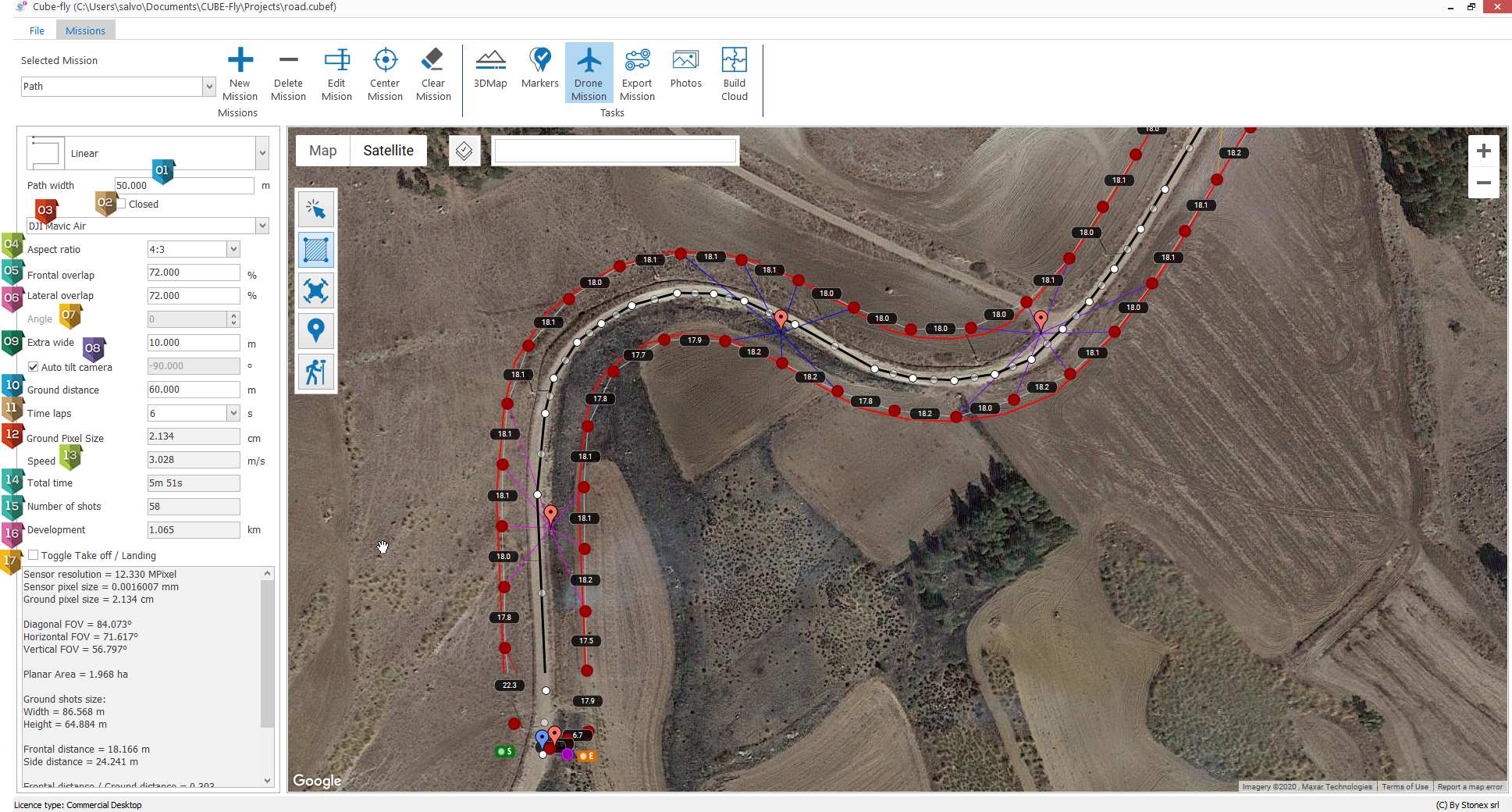
Linear mission
Linear Mission
|
Mission path width to cover by the photos, bigger it is and lower is the ground level more are the drone path to add. If the path width is odd the drone will pass on the path mission, if it is even it will not pass on it |
|
If activated the last mission point will be connected to the first point. |
|
Camera drone chosen, it is important to select as first because it defines all parameters of drone mission. |
|
Aspect ratio available on the camera. |
|
Front overlap of photos, in this kind of mission we advice to higher this value, the overlap of not parallel shots change from left and right side, can be needed to arrive to 80% or 85%. |
|
Lateral overlap of photos, in this kind of mission we advice to higher this value. |
|
Angle rotation, not available for linear mission. |
|
Length of extra path when the drone has to come back on the path, it guarantees to cover fully the path and will turn by a curve instead to stop, rotate and restart with big saving battery and time. |
|
If activated the Tilt will be -90° (vertical) in general this value cover all cases for linear mission. |
|
Distance between Drone and terrain, if the terrain aware will not be calculated this distance remains constant and it is very important to take off from the highest point. Note that the overlap is not guaranteed because the ground distance become variable. |
|
Time between each shot, bigger values give slower speed and better quality. Note: be careful that this parameter influence also the total time of flight. |
|
Size in cm of one pixel in the photo. |
|
Speed of drone, smaller values gives better photos quality. In general to get a good quality the speed has to be less than 5 m/s, best quality less than 4 m/s |
|
Total flight time without considerate the wind speed. Better to stay to 75% of battery time possibilities taking in consideration the life of the battery. Older they are less it the autonomy. |
|
Approximate number of shots |
|
Path development length. |
|
Alternate take off and landing point. In general it is preferable to start from the furthest point and end at the closest point. |

















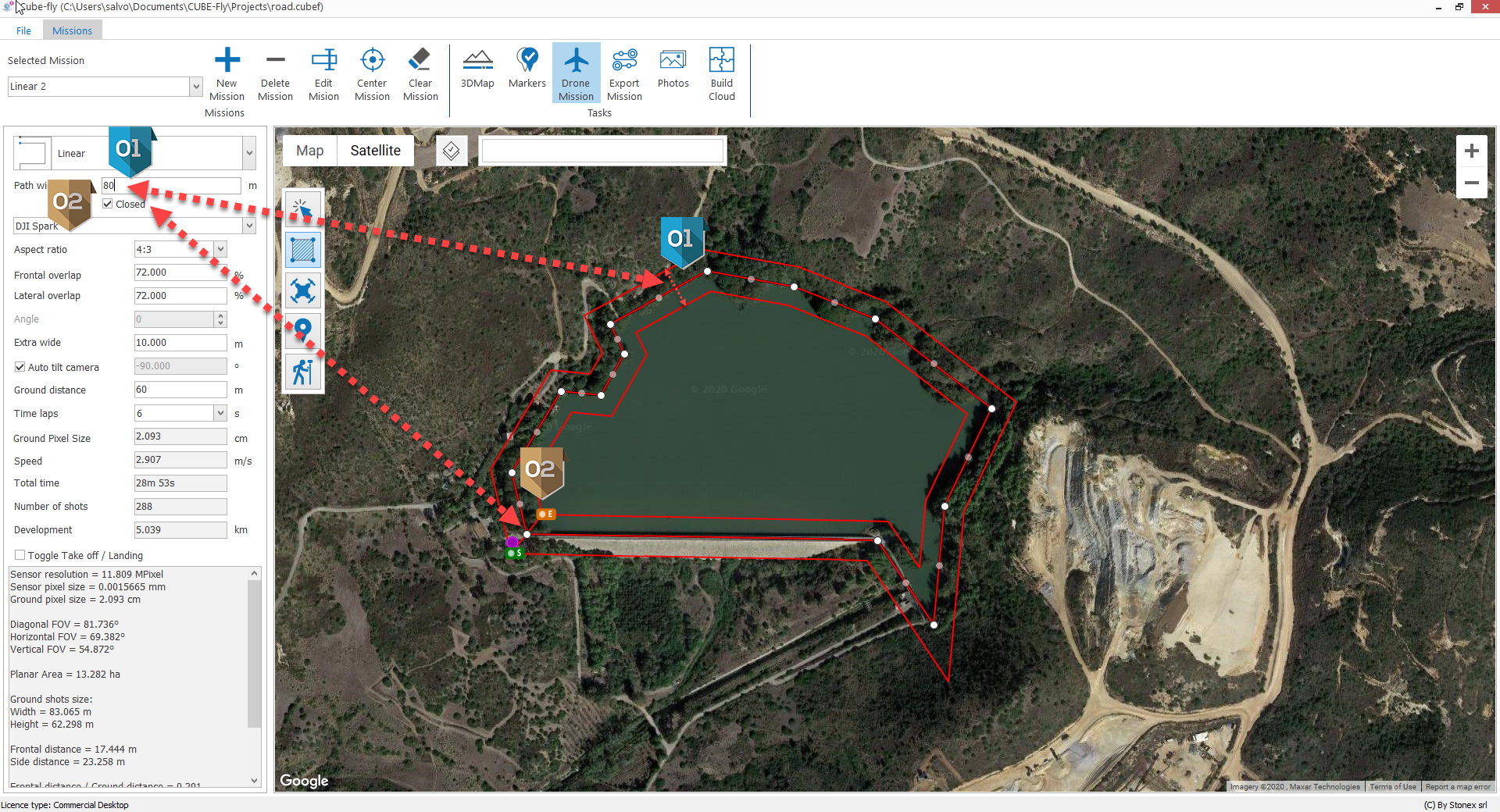
Example of closed linear mission
In this mission you can note that you can cover a big area of survey without to take just water that is all on the same level and will be only lost time
|
If the path width is odd the drone will pass over the path mission, if it is even it will not pass over it |
|
If activated, the last mission point will be connected to the first point. |